杂粮营养价值高,保健功能强,市场需求逐年攀升。由于这些小杂粮种在田角地边和丘陵山区的贫瘠土地里,收获机械化程度很低[1],收获机械少之又少[2]。丘陵山区地块小,不适宜大型联合收割机作业,现有的麦谷类杂粮联合收割机因技术不成熟造成收获损失率较大[3-5]。分段收获的特点是用多种机械分别完成割、捆、运、堆垛、脱离和清选等作业方法,这种方法使用的机械构造简单,设备投资较少[6]。为减轻劳动强度,提高劳动生产率,针对麦谷类杂粮的分段收获研发的小型杂粮割捆机,可一次性完成收割、打捆、成捆铺放等作业。本文主要对杂粮割捆机的扶禾装置、横向输送装置及打捆机构进行了分析研究。
1 扶禾装置的设计
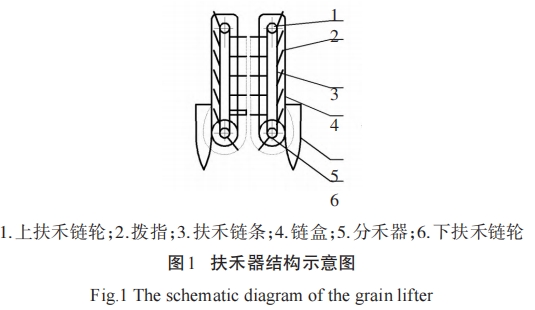
扶禾装置包括分禾器和扶禾器,扶禾器安装在割台前面,由左右 2个带拨指的链条、扶禾链轮和链盒组成,安装时与机器的前进方向呈一定倾斜角度。
1.1 扶禾器作用及结构
扶禾器是扶禾装置的主要部件,对作物在秋季遇风雨不能直立收获有较强扶禾效果,扶禾器有倾斜面型和垂直面型扶禾器两种,本设计选用倾斜面型,倾斜面型扶禾器由分禾器、拨指、扶禾链轮、扶禾链条、链盒及导轨等组成[7]。

1.2 扶禾工作过程
扶禾链条位于割刀前方,在链盒中转动,拨指铰接在扶禾链条上,在链盒内可以伸出或缩回。扶禾器利用链条上的拨指插入杂粮作物根部,把倒伏作物扶起,在工作过程中从上到下有较强的梳理秸秆功能。在扶禾装置配合下,扶住茎秆进行切割,扶持过程基本保持茎秆直立,禾层均匀不乱,然后交接给输送装置[8]。
1.3 拨指速度及运动轨迹
每个拨指的工作过程有伸齿搂禾、扶持、缩回 3个行程。拨指尖的运动轨迹是绕链轮回转和同整机向前行驶2个运动的合成。图2所示虚线为倾斜面型分禾器指尖的运动轨迹。
以下链轮中心在地面的投影 O 为坐标原点,X 轴方向是割捆机前进方向,Y轴方向垂直向上,指尖在 a处起始,ab段是搂禾段,bc段是扶禾段。图 2中 a1b1c1;a2b2c2分别是 2图中abc的投影。a1b1曲线段和b1c1直线段分别是拨指尖搂禾、扶禾时在XOY平面上的轨迹。a2b2圆弧段和b2c2 直线段分别是拨指尖搂禾、扶持时在链盒平面上的轨迹。
1.3.1 拨指速度分析
拨指在工作过程中,遇到倒伏时在撞击杂粮的穗头或梳理秸秆时会有掉落颗粒的损失,拨指的速度和损失大小有直接关系[9]。
1)bc直线部分速度
下链轮带动拨指的线速度
v直 = 2πrn/60 = πrn/30. (1)
拨指在XOY平面水平合成速度为
v平 = vq - v直 cos α. (2)
拨指在XOY平面垂直方向分速度
v垂 = v直 sin α. (3)
2)回转部分指尖速度
下链轮带动拨指回转线速度
v转 = 2π(r + m)n/60 = πr(r +m). (4)
拨指尖在XOY平面水平合成速度为
v转平 = vq - v转 cos α sin ωt. (5)
拨指尖在XOY平面垂直方向分速度
v转垂 = v转 sin α sin ωt. (6)
拨指尖对作物侧向分速度
v转侧 = v转 cos ωt. (7)
式中:n——下链轮转速,rpm;ω——下链轮角速度,rad/s;α——扶禾倾角,°;t——下链轮转动的时间,s;r——下链轮半径,m;m——拨指长度,m;vq——割捆机前进速度,m/s。
1.3.2 拨指尖轨迹
如图2所示。
当ωt≤π/2时,搂禾轨迹方程
当ωt>π/2时,扶持轨迹方程
式中:h——指尖离地高度,m。
从式(8)(9)得,当链轮半径r,拨指长度l确定时,拨指尖
的轨迹与扶禾倾角α,链轮角速度ω,割捆机前进速度vq有关系。由图 2知,在 XOY 平面 b1c1段与铅锤方向夹角越小扶持茎秆效果越好。
1.4 扶禾作用与参数确定
拨指的扶禾轨迹bc是一条直线,方向是拨指线速度v直与机具前进速度 vq的比值 k及扶禾倾角 α的合成。如图 3所示,设v与铅锤方向夹角γ向前方向为负,向后为正,可得
式中: v——扶禾时拨指的绝对速度,m/s;γ——v与铅锤方向的夹角,°。
因为收获时有顺倒和逆倒两种情况,扶禾过程就是使茎秆向拨指运动的方向角γ靠拢。当茎秆根部在扶禾轨迹前面而穗部在扶禾轨迹后面,茎秆会受向前侧的拨指推动,相反,穗部在扶禾轨迹后面而根部在后面扶禾时则会受到向后拨指的拉动。顺向收割时,根部在拨指前面茎秆被拉动,割捆机向前运动,下一个拨指可能不会梳理同一根杂粮杆,即只是一个拨指一次把杂粮杆扶起,逆向收割时,杂粮茎秆受推扶之力,根部同样在拨指前面,但穗部位于后面先接触拨指,会出现一个杂粮茎秆受到几个拨指的扶持,对茎秆而言就是由上部分到下部分被推扶,最后拨指把杂粮茎秆扶起。
拨指在最低处和地面有摩擦和冲击,选材为工程塑料,提高拨指耐磨性。确定拨指长度 l 为 105 mm,下链轮半径 r 为50 mm,扶禾倾角α为70°,下链轮转速n为200 rpm,机具前进速度vq为0.78 m/s。试验结果拨指运动达到作业性能要求。
2 横向输送装置
输送装置由输送链轮、输送链条、输送链齿等组成。输送装置的功能是把已割作物侧向输送到打捆机构。作物被切割后在分禾器和扶禾器的作用下到达输送装置,输送链齿在链轮的驱动下,把站立的瞬间的作物直立输送到一侧,设计要求秸秆输送均匀连续,秸秆处于直立状态。本设计采用小三层链条装置以期有较好的输送效果。
3 打捆机构
打捆机构是小型麦谷类杂粮割捆机的最重要装置,直接决定整机的收获质量和使用性能,其作用是把横向输送装置送过来的作物秸秆呈束打捆然后推送到田间。打捆机构包括捆绳、打捆针、压紧杆、离合器控制杆、打结嘴、打结器、压紧绳板及推出杆等。
杂粮茎秆被送到打捆机构,集中在压紧杆和离合器控制杆之间,随着茎秆的增多,密度增大,茎秆对离合器控制杆的压紧力逐渐增大,当压力达到预定设置值,离合器杆开始移动,离合器爪脱开,打捆针开始工作。打捆针尖带着捆绳绕茎秆束做回转运动,经打结嘴移动到打结器处,和压紧绳板处的绳头相连进行打结,打结器转一周,捆绳被割断,打结完
成,推出杆把秸秆捆推出,打捆回合结束。
4 结论
第一,该机体积小,质量轻,机动灵活,操作简单方便,割茬低。适用于谷子、荞麦、燕麦、莜麦、黍子、大麦等杂粮的分段收获。
第二,经试验拨指长度l为105 mm,扶禾倾角α为70°,下链轮转速n为200 rpm,下链轮半径r为50 mm,机具前进速度
vq为 0.76~1 m/s 时,搂禾、扶持秸秆效果好,保持杂粮秸秆基本直立,禾层不乱,工作性能稳定。
第三,有输送装置和打捆装置结合配套,使整个机体的工作过程合理、有序、便捷、高效,较好的完成割捆工序。